
| SpaceClaim Ayuda en línea |
|
Utilice la herramienta Rosca para crear una![]() superficie roscada en cualquier cilindro, cono u orificio. Seleccione un borde o una cara roscados para ver sus propiedades en el panel Propiedades.
superficie roscada en cualquier cilindro, cono u orificio. Seleccione un borde o una cara roscados para ver sus propiedades en el panel Propiedades.
La profundidad de un orificio ciego roscado en una superficie curva se define como la distancia medida desde el extremo de la rosca hasta el punto más cercano en el contorno exterior de la rosca.
Seleccione la herramienta Rosca ![]() en el grupo de la barra de herramientas Anotación
en el grupo de la barra de herramientas Anotación , en la pestaña Detalles.
, en la pestaña Detalles.
Haga clic en el borde de un cilindro, orificio o cono.
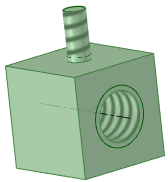
Las roscas se indican como un espiral, no circular, la textura de la superficie y la profundidad de la rosca se muestra al ver el objeto roscado en el modo Sección. En el árbol de estructuras también aparece un objeto con una rosca interna![]() o una exterior
o una exterior![]() . (Las roscas rotas aparecen con un pequeño triángulo amarillo sobre el icono).
. (Las roscas rotas aparecen con un pequeño triángulo amarillo sobre el icono).
Haga clic en la superficie para editar las propiedades de la superficie roscada en el panel Propiedades.
Type (Tipo): controla si las roscas se seleccionan de una tabla o se introdujeron manualmente. Para las roscas de cilindros, seleccione Standard (Estándar) para seleccionar los valores de las otras propiedades de la lista desplegable. Los valores más probables se seleccionan de forma predeterminada (siguiente tamaño más pequeño para roscas externas y siguiente tamaño más grande para roscas internas). Seleccione Custom (Personalizar) para introducir valores de desplazamiento. Para roscas ahusadas (roscas en superficies cónicas) solo puede utilizar la opción Offset (Desplazar).
Series: puede seleccionar ISO o o UNC.
Size (Tamaño): seleccione de una lista de tamaños disponibles en la serie que seleccione.
Thread Depth Type (Tipo de profundidad de la rosca): puede ser Blind (Ciega) o Full Thread (Rosca completa). La rosca completa es el valor predeterminado para los orificios pasantes y la rosca ciega se elige automáticamente cuando el cilindro o el cono donde se coloca la rosca termina en un plano de un borde convexo.
Minor Diameter (Diámetro menor): el diámetro más pequeño, o interno, de una rosca.

Major Diameter (Diámetro mayor): el diámetro más grande, o externo, de una rosca.

Haga clic en el borde u orificio roscado en la ventana de Diseño o seleccione la rosca en el árbol de estructuras.
Pulse la tecla Tab o haga clic en el campo de dimensiones.
Escriba un nuevo valor para la profundidad.
Los archivos XML de datos sobre la rosca que accionan los menús desplegables de las propiedades de la rosca estándar se encuentran en el directorio Library/Threads de SpaceClaim. Usted puede:
Agregar archivos al directorio para visualizar el nombre en el menú desplegable de propiedades Series al hacer clic en la superficie roscada con la herramienta Rosca. Eliminar archivos para eliminarlos de la propiedad.
Agregar filas a un archivo individual para visualizarlos en el menú desplegable Size (Tamaño). Eliminar filas para eliminarlas de la propiedad.
Especificar un directorio diferente para los archivos de rosca al agregar un directorio diferente a las opciones del archivo de compatibilidad.
Este es un ejemplo del archivo XML que se utiliza para las roscas:
<?xml version="1.0" encoding="utf-8"?>
<thread:ThreadSizeTable xmlns:thread="http://www.spaceclaim.com/threadSizeTableVersion2">
<thread:Units>in</thread:Units>
<thread:ShowThreadDesignationInDiameterDimension>false</thread:ShowThreadDesignationInDiameterDimension>
<thread:ThreadSizes>
<thread:ThreadSize>
<thread:Name>1 - 64</thread:Name>
<thread:Size>0.073</thread:Size>
<thread:MinorDiameter>0.0544</thread:MinorDiameter>
</thread:ThreadSize>
</thread:ThreadSizes>
</thread:ThreadSizeTable>
Para utilizar el ejemplo anterior,
Copie el texto que está dentro del cuadro gris y péguelo en un archivo de texto.
Guarde el archivo con extensión .xml en la carpeta SpacClaim Library/Threads.
Por ejemplo, el archivo podría tener el nombre MyThreads.xml.
Cambie el texto que se muestra en rojo por los valores que desee.

|
Debe agregar sus propios archivos personalizados en lugar de cambiar los archivos predeterminados. |
© Copyright 2015 SpaceClaim Corporation. Todos los derechos reservados.